

















Tudo que você precisa saber sobre motores de passo
A poderosa capacidade altamente confiáveis dos motores de passo
Os motores de passo são, muitas vezes, erroneamente considerados inferiores aos servomotores; no entanto, de fato, eles são altamente confiáveis, do mesmo modo que os servomotores. O motor opera sincronizando, de modo preciso, com a saída do sinal de pulso do controlador para o driver, atingindo posicionamento e controle de velocidades altamente precisos. Motores de passo possuem alto torque e baixa vibração em baixas velocidades, ideal para aplicações que exigem posicionamento rápido a curta distância.
Tudo que você precisa saber sobre motores de passo
"Motores de passo? Servomotores tem melhor desempenho." Esta é uma resposta típica ao falar sobre motores de passo. Obviamente há um grande mal-entendido sobre motores de passo. De fato, os motores de passo têm sido utilizados em vários tipos de aplicações, tais como equipamento avançado e instrumentos automatizados acessíveis. As razões pelas quais motores de passo têm sido escolhidos constantemente são explicadas neste artigo. Alguns leitores podem afirmar que nunca viram um motor de passo antes. Os motores de passo têm sido usados em muitas aplicações e setores, tais como solução em motor para sistemas de direção que exijam controle de alta precisão, automação Industrial, fabricação de equipamentos para semicondutores, FPD e painel solar, dispositivos médicos, instrumentos analíticos, plataformas de precisão, controle de cédulas, máquinas de embalar alimentos e ajustes de abertura de diafragma para câmeras.
Principais pontos: Fácil de usar, operações simples e baixo custo
De acordo com uma pesquisa de usuários de motores de passo, muitos preferem os motores de passo pela sua "facilidade de uso", "operações simples" e "baixo custo" derivados da estrutura e da configuração do sistema. É compreensível que muitos usuários vejam esses aspectos positivos em motores de passo, devido à estrutura simples e à configuração do sistema.
No entanto, alguns usuários podem ser céticos em relação ao desempenho real do motor em termos de precisão e torque. Não é fácil compreender totalmente a ideia, a menos que haja exemplos de comparação com outros motores de controle, como os servomotores. Ao conhecer as características e considerar métodos diferentes com base em operações necessárias, os motores de passo certamente podem reduzir o custo do equipamento.
As características e informações técnicas dos motores de passo são explicadas abaixo:
"Precisão de parada" impressionante. Move-se rapidamente em "baixo/médio faixa de velocidade"
Os motores de passo têm precisão de parada notável e é possível fazer um controle preciso com circuito aberto. Por exemplo, ao utilizar a Série RK II para o posicionamento de uma mesa rotativa, a sua precisão de parada é de ± 0,05 graus (sem carga). Uma vez que erros de posição de parada não se acumulam entre os passos, é possível obter alta precisão de posição. A estrutura do motor de passo, a qual não exige encoder, permite um sistema de direção simples e baixo custo.
Ponto 1
Incrível precisão de parada!
Por exemplo, ao converter a precisão de parada ±0,05° de um motor de passo para o mecanismo de fuso esfera: Condições de operação:
- Motor: Série RK II
- Condução do parafuso esférico: 10 mm Precisão de parada: ±1,4 m
Geralmente, a precisão de um fuso esfera tipo retificado é de ±10 m. Ao usar um tipo fuso esfera laminado, a precisão cai para ±20 m, indicando que a precisão de parada de um motor de passo é muito mais alta que os fuso esfera.
O alto torque dentro do intervalo de velocidade baixo/médio é outro excelente recurso dos motores de passo. Uma das principais características dos servomotores é gerar torque uniforme de intervalos de velocidade baixos a altos. Servomotores são adequados para operações de longo curso (muitas rotações). Por outro lado, as características de torque de motores de passo não são constantes. A curva de torque na faixa de velocidade baixa/média tende a ser mais alto, ao mesmo tempo que se torna muito baixo em faixas de velocidade altas. Por outro lado, as rotações constantes na faixa de velocidade baixa, no qual o servomotor tem dificuldade, o motor de passo pode oferecer alto torque dentro da faixa de velocidade requisitada para operações de curto alcance (menos rotações). Assim eles são adequados para ângulos de passo diversos como mesas rotativas e aplicações de avanço lento. Isto se deve ao rápido posicionamento para a operação de curso pequeno. Portanto, o motor desacelera e para antes de atingir a velocidade máxima. Em outras palavras, em geral, não são recomendadas para alta velocidade.
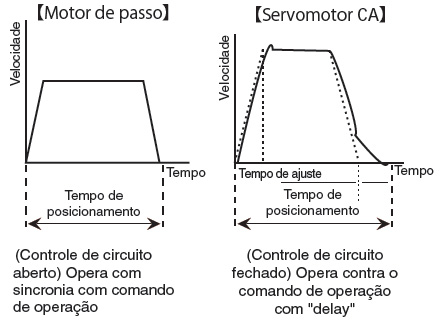
Rápida resposta e excelente sincronia
O terceiro notável recurso dos motores de passo é a responsividade. O controle de circuito aberto, que envia comandos unidirecionais para o motor, tem um mecanismo de alto feedback para os comandos. Enquanto os servomotores, os quais esperam resposta do encoder, tendem a ter "delay" com os comandos, os motores de passo operam em sincronia com um pulso. Portanto, há muito poucos "delay", resultando em excelente resposta. Por esta razão, motores de passo são adequados para aplicações que exigem operações sincronizadas de motores múltiplos. Um exemplo é a aplicação de placa de transferência, a qual precisa dois transportadores, com um motor montado respectivamente, para transferir placas entre os dois transportadores.
Ponto 2
Exemplo: O torque de um motor de quadro 85 mm é equivalente ao torque nominal de um servomotor de 400W quando a 1000 rpm.
O torque em intervalo de velocidade ainda mais baixo pode ser até 5 vezes superior. Para posicionamento a curta distância, é essencial ter alto torque em faixa de velocidade baixo/médio.

Ponto 3
Alta responsividade!
![]()
Aplicações adequadas!
Diferente de uma aplicação de avanço lento com início e interrupção frequentes, os motores de passo são adequados para o posicionamento de processadores de verificação de imagem incompatíveis com vibrações, acionadores de câmera que seriam difíceis de ajustar com servomotores e mecanismos de baixa rigidez como um acionamento de correia. Além disso, substituindo um acionamento de fuso esfera por um acionamento de correia, o custo é significativamente reduzido.
Outros exemplos de aplicação:



Redução de custo e vantagens dos excelentes recursos
Além da redução de custo, motores de passo têm muitas vantagens em termos de desempenho. O gráfico abaixo mostra o torque de conversão do exemplo da Série RKII para o de intervalos típicos de potência de servo. Nas páginas a seguir, são apresentadas informações detalhadas dos motores de passo, tais como estrutura básica, sistema e exemplo de aplicações.
| Tamanho do motor | Nome do produto | Potência (referência) |
|---|---|---|
| 42 mm | RKS543 |
Equivalente a 50 ~ 100 W |
| RKS544 | ||
| RKS545 | ||
| 60 mm | RKS564 | Equivalente a 100 ~ 200 W |
| RKS566 | ||
| RKS569 | Equivalente a 200 ~ 400 W | |
| 85 mm | RKS596 | Equivalente a 400 ~ 750 W |
| RKS599 | ||
| RKS5913 | ||
| *Calculado com a Série RKII Para um quadro de motor com tamanho de 42 mm, a potência é equivalente àquela de um servomotor com 50 a 100W. Além disso, a potência de um quadro de motor de 85 mm é equivalente àquela de um servomotor com 400 a 700W. Pode variar dependendo da série e do tipo, mas este gráfico pode ser usado durante a escolha do produto. | ||
Noções básicas dos motores de passo
Operação e estrutura
Um motor de passo tem rotação com um ângulo de passo fixo, como o ponteiro de minutos do relógio. O posicionamento de alta precisão pode ser executado com controle de circuito aberto devido à estrutura mecânica no motor.
Posicionamento preciso (número de passos)
Ao mesmo tempo que tem controle total da rotação e da velocidade, a estrutura simples dos motores de passo é conseguida sem o uso de componentes elétricos, tais como um encoder dentro do motor. Por esta razão, motores de passo são muito robustos e têm alto nível de confiabilidade, com muito poucas falhas. Em se tratando da precisão de parada, +0,05° (sem erros de passo cumulativos) é muito preciso. Uma vez que o posicionamento dos motores de passo é realizado por controle de circuito aberto e operado pelo estator magnetizado e pelo rotor magnético com dentes pequenos, os motores de passo têm um mecanismo de acompanhamento mais alto em relação aos comandos que aquele de servomotores. E, também, não há ocorrência de oscilação (hunting) ao parar os motores de passo. Eles também são excelentes em direcionamento por correias, as quais têm baixa rigidez.
Úteis para controle de velocidade e controle de posição
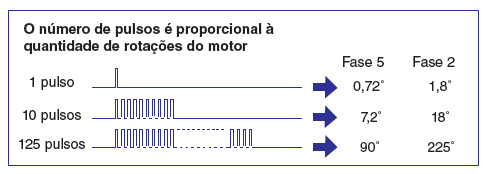
Quando os pulsos entram em um driver por meio de um gerador de pulso, os motores de passo se posicionam de acordo com o número de pulsos de entrada. O ângulo de passo básico de motores de passo de 5 fases é 0,72° e 1,8° para motores de passo de 2 fases. A velocidade de rotação do motor de passo é determinada pela frequência do pulso (Hz) dada para o driver e é possível mudar livremente a rotação do motor simplesmente mudando o número de pulsos de entrada ou de frequências para o acionador. Motores de passo não só funcionam como motores de controle de posição, mas também como motores de controle de velocidade com alta sincronia.
Motores de passo usam:
- Alta variáreis, posicionamento repetitivo de ângulos de passo fixos
- Posicionamento que precisa de longo tempo de parada devido ao ajuste de largura, etc.
- Cargas flutuantes e alteração de rigidez
- Posicionamento que divide 1 ciclo
- Eixos de motor que exigem operação sincronizada

Sistema operacional
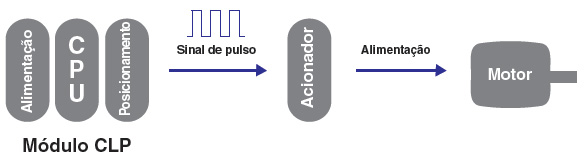
Controle simples sem sensor ou feedback
Uma vez que é possível realizar o posicionamento preciso e controle de posição durante a sincronização com o número de pulsos de comando e de velocidade, não há necessidade de dispositivos, como um sensor, para o posicionamento. Portanto, é simples construir todo o sistema. Se controle avançado, como uma operação de interpolação, não for necessário, o acionador de tipo de função de controlador embutido é recomendado. O custo é reduzido ao eliminar controladores, tais como um gerador de pulso e módulos de posicionamento CLP.
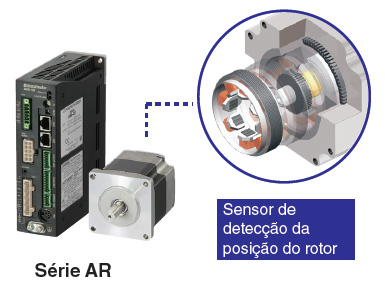
Sensor tipo circuito fechado acoplado
Apesar de ser possível o posicionamento de alta precisão com controle circuito aberto, o que aconteceria se houvesse um problema? Para evitar essas armadilhas, um motor com encoder ou tipo controle de circuito fechado (Séries AR) pode ser usado.
A quantidade de rotações e a velocidade do motor podem ser facilmente controladas por meio de sinais de pulso.
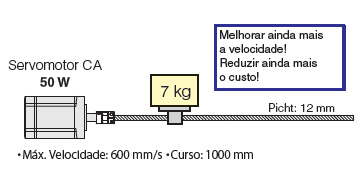
O custo pode ser reduzido ainda mais?
O problema comum entre os engenheiros de projeto é a redução de custo. Não há mesmo como reduzir os custos ainda mais? Para descobrir isso, um teste de redução de custos, com melhorias de especificação, foi conduzido com base no mecanismo de fuso esfera. A seguir, a explicação dos detalhes do teste:
Missão |
Mecanismo de movimento linear
|
Plano |
|
Problemas |
1 Diferença na precisão de parada entre parafuso e correia... Quanto de precisão de parada é necessário? 2 Impacto da baixa rigidez... Impacto sobre o tempo de estabilização, evitando problema de ajuste1 Melhor precisão de parada com o fuso. Sem problema em mudar para correia? => A precisão de parada exigida da aplicação é ± 0,05 ~ 0,1 mm, que não é tão precisa quanto com parafuso. Portanto, não deve haver problema em substituir por correia. 2 Se mudar para correia, a rigidez no mecanismo diminuí, assim os movimentos do servomotor se tornam instáveis. => Entre os motores de posicionamento, motores de passo não tem um encoder acoplado. Por essa razão, eles não precisam de ajuste e são fortes contra a baixa rigidez. Seus movimentos são estáveis independentemente das cargas variáveis. Se a saída for a mesma, considere os motores de passo.
|
Resultados |
Há muita margem para a redução de custo!Ao fazer uma avaliação com base zero dos mecanismos, e também da seleção do motor com base nas características, conseguimos aumentar as especificações e reduzir o custo, mesmo com o tamanho do motor tornando-se um pouco maior. No passado, a seleção do motor era feita com base na sua facilidade de uso ou familiaridade. Depois deste exercício, as diferenças de operação entre motores de passo e servomotores ficaram claras. Foi surpreendente constatar que motores de passo são mais acessíveis que o esperado. Deve haver margem para a redução de custo de outros dispositivos usando este método. Este exercício confirmou que a seleção bem equilibrada entre as especificações do motor e os custos, enquanto as características do motor são maximizadas, é a chave.
|
 Mudar o mecanismo para polia de correia
Mudar o mecanismo para polia de correia Qual tem a mais alta precisão de parada: motor de passo ou o servomotor?
Perguntas para o cliente: Em busca de um motor com boa precisão de parada. Quanta diferença existe entre motores de passo e servomotores?
Suposição: O servomotor CA Série NX está equipado com um encoder de 20 bits, portanto, ele deve ter alta volta e boa precisão de parada.
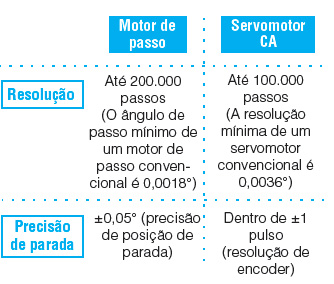 Primeiro, é necessário esclarecer
a diferença entre resolução e precisão de
parada: resolução é o número de passos
por revolução e também é chamado de
um ângulo de passo para motores de
passo. Isso é necessário ao considerar a
precisão do posicionamento necessário.
Precisão de parada é a diferença entre a
posição de parada real e a posição de
parada teórica.
Primeiro, é necessário esclarecer
a diferença entre resolução e precisão de
parada: resolução é o número de passos
por revolução e também é chamado de
um ângulo de passo para motores de
passo. Isso é necessário ao considerar a
precisão do posicionamento necessário.
Precisão de parada é a diferença entre a
posição de parada real e a posição de
parada teórica.
Isso significa que o servomotor CA equipado com um encoder de alta precisão tem melhor precisão de parada que os motores de passo? Não exatamente. No passado, não havia nenhum problema com o conceito de "precisão de parada de servomotores sendo igual à resolução do codificador dentro de ± 1 pulso." No entanto, servomotores recentes são equipados com o encoder de 20 bits (1.048.576 passos), o qual tem uma resolução muito fina. Por causa disso, erros devido à precisão de instalação do encoder têm um enorme efeito sobre a precisão de parada. Portanto, o conceito de precisão de parada começou a mudar um pouco.
De acordo com as tabelas de comparação, a precisão de parada entre motores de passo e servomotores CA é quase a mesma (±0,02° ~ 0,03°). A precisão depende da exatidão mecânica do motor para motores de passo; portanto, se a posição de parada pode ser feita por 7,2°, o posicionamento é feito pelos mesmos dentes pequenos do rotor em todas as vezes, de acordo com a estrutura do motor. Isto possibilita aprimorar a precisão de parada ainda mais. Contudo, motores de passo podem gerar ângulo de deslocamento dependendo do valor do torque de carga. Além disso, dependendo das condições do mecanismo, servomotores CA podem ter largura de ocilação (hunting) mais ampla como uma resposta para ganho de ajustes. Por essas razões, alguns cuidados são obrigatórios.
Comparação da precisão de parada entre motores de passo e servomotores CA

![]()
Horário Comercial:
Segunda a Sexta
8:30 to 17:00 horário de Brasilia
Vendas, Atendimento ao Cliente e Suporte Técnico:
+55-11-3266-6018