Visão geral dos recursos do servomotor
Recursos de servomotores
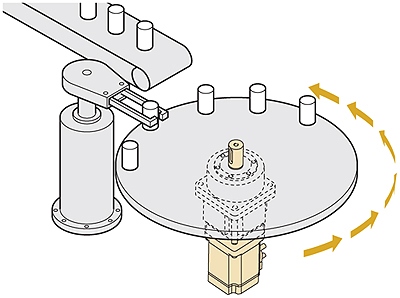
O servomotor é especializado para posicionamento de alta resposta e alta precisão. Como um motor capaz de controle preciso do ângulo de rotação e da velocidade, pode ser usado em uma variedade de equipamentos.
Controle de circuito fechado
Um detector de rotação (encoder) é montado no motor e alimenta a posição/velocidade de rotação do eixo do motor de volta para o acionador. O acionador calcula o erro do sinal de pulso ou da tensão analógica (comando de posição/comando de velocidade) a partir dos sinais do controlador e do feedback (posição/velocidade atual) e controla a rotação do motor para que o erro seja zero. O método de controle de circuito aberto é obtido com um acionador, motor e encoder, para que o motor possa realizar operações de posicionamento altamente precisas.
- Um sinal de END é obtido que comunica a conclusão da operação de posicionamento.
- Um alarme pode ser emitido se houver uma anormalidade como uma sobrecarga, possibilitando comunicar anormalidades no equipamento.
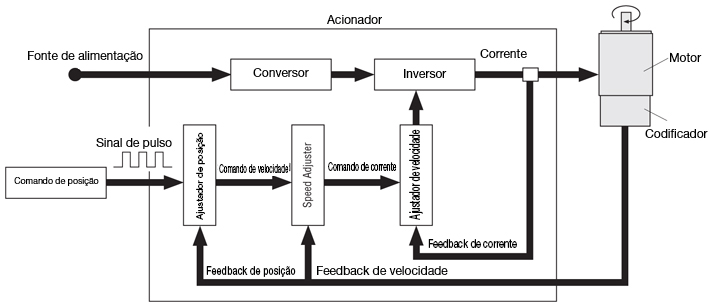
Controle de posição usando um sinal de pulso
O controlador insere o sinal de pulso. A velocidade e a posição de parada são controladas de acordo com o número de pulsos.
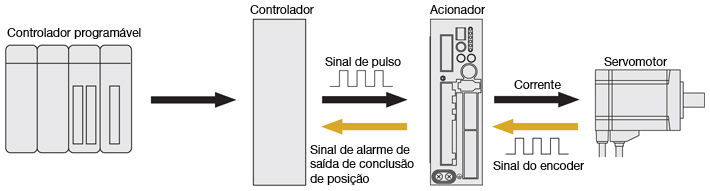
Diagrama do controle de posição
Controle de velocidade por tensão analógica
A tensão analógica é inserida para controlar a velocidade.
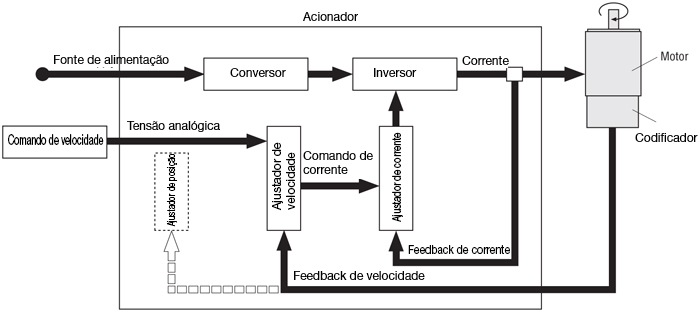
Diagrama do controle de velocidade
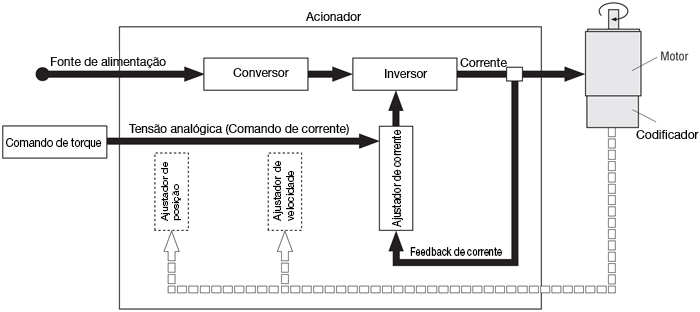
Controle de torque por tensão analógica
A tensão analógica é inserida para controlar o torque.
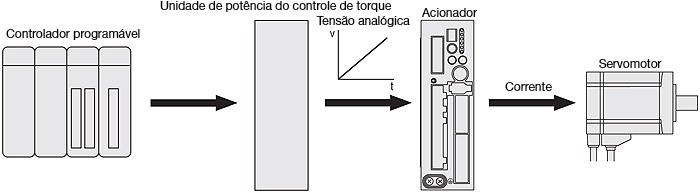
Diagrama do controle de torque
Compacto e com alta potência
O servomotor é compacto e leve e produz alta potência.
Características de velocidade-torque
Potência de saída nominal: 200 W (1/4 HP)
Tamanho do motor: 60 mm (2,36 pol.)
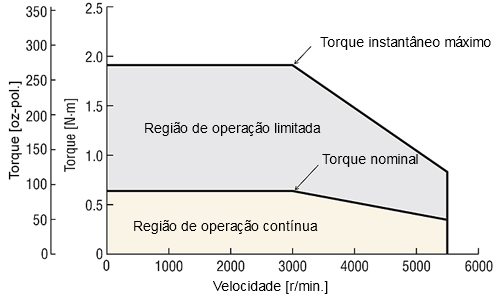
Região de operação contínua e região de operação limitada
Um servomotor controla a corrente de acordo com o estado da carga. Devido à eficiência e baixa geração de calor do motor, a operação contínua é possível dentro do torque nominal. Além disso, durante a aceleração e desaceleração, a região de operação limitada é utilizada para obter um torque alto, possibilitando reduzir o tempo de posicionamento.
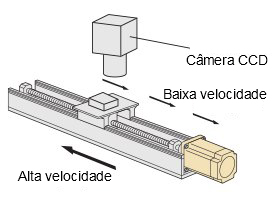
Uma ampla faixa de velocidade variável
Um torque constante e estável é gerado na faixa de baixa a alta velocidade, de modo que é possível realizar rapidamente um posicionamento de curso longo. O ciclo da máquina é melhorado em equipamentos de teste retornando rapidamente em alta velocidade após transportar lentamente a peça de trabalho em baixa velocidade.
Motorredutor também compatível com grandes cargas de inércia
O servomotor possui restrições na inércia da carga permitida, mas o motorredutor pode ser usado para aumentar significativamente o tamanho da carga que pode ser acionada.