

















SCX11 Driver Universal de Eixo Simples

SCX11 Driver Universal de Eixo Simples
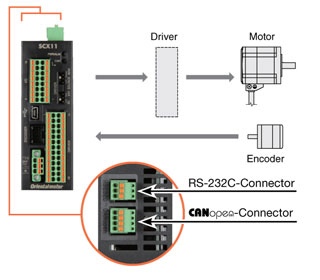
O SCX11 é um controlador altamente funcional e sofisticado, equipado com funções de edição e execução de programas. Use o SCX11 como um controlador de programa armazenado para se conectar a qualquer um dos drivers de entrada de pulso padrão do Motor Oriental. O SCX11 também é capaz de controlar o motor através de comunicações seriais como USB, RS-232C e CANopen. Aceita entradas de encoder.
- Entrada de 24 VCC
Incluído com SCX11:
- Universal Controlador (SCX11)
- CD-ROM (Immediate Motion Creator for SCX Series, Operating Manual, CANopen, EDS files)
- RS-232C connector (3 pins)
- CANopen connector (4 pins)
- Power Connector (3 pins)
- Encoder connector housing / contact (8 pins)
- Start up manual
Linha de produtos
Item |
Number of Control Axis |
Serial Communication |
Daisy Chain |
Encoder Feedback |
Maximum Pulse Frequency |
|
Eixo único |
RS-232C |
Yes |
Yes |
1.24 MHz |

Universal Controlador
100 programas de seqüência podem ser armazenados
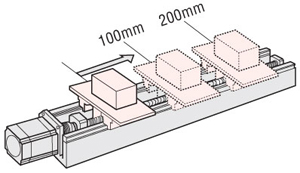
O SCX11 pode armazenar até 100 programas e executar várias operações, desde movimentos simples como "operação de posicionamento repetido" até controles complicados como "operação por cálculo do valor baseado em entradas externas".
Fácil Operação
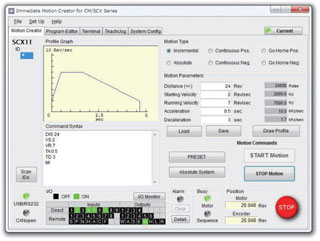
O software para PC é conveniente e fácil de usar, " Immediate Motion Creator for CM/SCX Series", é fornecido com o SCX11. Inicie facilmente uma operação com o clique de um botão ou tecla de início, definindo a quantidade e velocidade de movimentos. A GUI permite a fácil criação de programas selecionando comandos da lista de comandos. Outras funções disponíveis incluem; Monitor de tempo real para a posição de ensino, posição atual e status de I/O, configuração do parâmetro do sistema, função do osciloscópio e atribuição de I/O.

Configuração Inteligente
Programe os dados para os valores de velocidade e deslocamento ajustando o parâmetro "User Unit". Os dados podem ser programados em unidades como "mm", "polegada" e "voltas".
Entrada Externa para Encoder
O SCX11 tem uma função para entradas de encoder externo que permite monitoramento contínuo da posição de realimentação e erro de posição. O driver de linha, o coletor aberto e as entradas TTL são compatíveis.
USB Port as Padrão Equipment
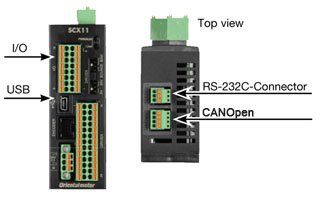
O SCX11 tem uma porta mini USB no painel frontal que pode se conectar diretamente a um PC através de um cabo mini USB comercialmente disponível. Não é necessário cabo ou conversor especial.
Várias Interfaces para Operação
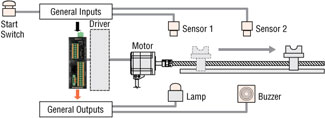
1. Operação Autônoma Usando Sensores e Switches
O SCX11 pode operar como um controlador autônomo, sem um PC ou controlador programável, utilizando 9 entradas gerais e 4 saídas gerais para selecionar as sequências desejadas.
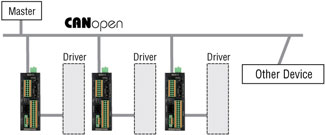
2. Operação de comando direto via CANopen
O SCX11 tem uma interface interna padrão para CANopen.
* CANopen para o SCX11 é certificado pela CiA (CAN in Automation).
3. Operação usando um PC
O SCX11 pode se conectar a um PC via RS-232C ou USB. O SCX11Também podem ser ligados através de uma ligação em cascata RS-232C paraMulti-eixo com outro SCX11 ou outros produtos como oMotor all-in-one Alphastep de circuito fechado ASX Series.

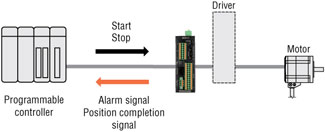
4.Operação usando um controlador programável
O SCX11 pode comunicar uma grande variedade de sinais via I/O a umaProgramável. As comunicações seriais também estão disponíveis, seO controlador programável tem uma interface USB ou RS-232C integrada.
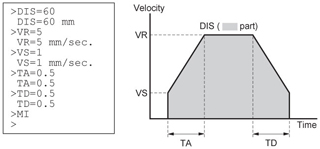
Dois Tipos de Operações
1. Executando a Operação de Sequência [Função de Programa Armazenada]
Esta função está disponível para ramificação condicional usando I/O de uso geral, processos de espera usando temporizadores internos e outras operações baseadas no controle de sequência, incluindo o ajuste dos dados de posicionamento e velocidade. O SCX11 pode armazenar até 100 programas diferentes que podem ser selecionados e executados via USB, RS-232C, CANopen e porta I/O.
[ Programa Examplo]
S e q 1
[1] V S 1; Velocidade de Partida
[2] V R 9; Velocidade de movimento
[3] T A 1; Tempo de Aceleração
4] T D 2; Tempo de desaceleração
[5] D I S 2; Distância de movimento incremental
[6] L O O P 3; Começar o bloco LOOP contado
[7] M I; Mover distância incremental
[8] M E N D; Aguarde o fim do movimento
[9] W A I T 1; Aguarde o tempo especificado
[1 0] E N D L; Fim do bloco LOOP
[1 1] M A 0; Mover para Posição Absoluta
[1 2] M E N D; Aguarde o fim do movimento
[1 3] E N D; Sequência final
* Você pode definir a velocidade e quantidade de movimentos como a unidade de seu movimento real, como "mm", "polegada" e "volta".
2. Operação de Comando Direto
Operar um motor diretamente através do envio de comandos via(USB, RS-232C, CANopen) a partir de um PC ou de umDriver. Esta função é adequada para aplicações em que o posicionamentoDados são atualizados com frequência ou gerenciados de uma só vez pelo Driver Programável.
[Comandos de exemplo]
D I S; Distância de movimento incremental
V R; Velocidade de corrida
V S; Velocidade de Partida
T A; Tempo de Aceleração
T D; Tempo de desaceleração
M I; Mover distância incremental
M A; Mover para Posição Absoluta
M C P; Mover Continuamente, Positivo
M C N; Mover Continuamente, Negativo


