DRL II Series Atuadores lineares compactos

Atuadores lineares compactos da série DRL II
Fuso de esferas integrado de alta precisão, incorporado a um motor de passo para proporcionar um movimento linear de alto posicionamento contínuo.
Disponível com ou sem guia, botão de ajuste ou freio eletromagnético. Reduz o número de componentes, como acoplamentos e guias externas secundárias, tornando o equipamento mais compacto, mais rápido para instalar e com menos peças para fazer pedido.
O controlador acoplado (dados armazenados) permite um acesso à rede facilitado e controle multi eixos simplificado.
- Tipos de motor padrão (0,72°) ou de alta resolução (0,36°)
- Drivers com controlador acoplado (Rede) ou de entrada de pulso
- Entrada de 24 VCC
- Precisão de posicionamento repetitivo
- Fuso de esferas retificado = ±0,003 mm
- Fuso de esferas laminado = ±0,01 mm
Linha de produtos
Tipo de atuador |
Tipo de driver |
Fonte de alimentação |
Opções disponíveis |
Força de atração |
Curso |
20 mm (0.79 in.) Atuador linear com guia |
24 VCC |
Botão de ajuste |
15 N
|
25 mm |
|
20 mm (0.79 in.) Atuador Linear |
24 VCC |
Botão de ajuste |
15 N
|
25 mm |
|
28 mm (1.10 in.) Atuador linear com guia |
24 VCC |
Botão de ajuste Freio eletromagnético |
30 N
|
30 mm |
|
28 mm (1.10 in.) Atuador Linear |
24 VCC |
Botão de ajuste Freio eletromagnético |
30 N
|
30 mm |
|
42 mm (1.65 in.) Atuador linear com guia |
24 VCC |
Botão de ajuste Freio eletromagnético |
30 N 100 N
|
40 mm |
|
42 mm (1.65 in.) Atuador Linear |
24 VCC |
Botão de ajuste Freio eletromagnético |
30 N 100 N
|
40 mm |
|
60 mm (2.36 in.) Atuador linear com guia |
24 VCC |
Botão de ajuste Freio eletromagnético |
300 N
|
50 mm |
|
60 mm (2.36 in.) Atuador Linear |
24 VCC |
Botão de ajuste Freio eletromagnético |
300 N
|
50 mm |
|








Atuadores lineares compactos
Design e estrutura confiáveis
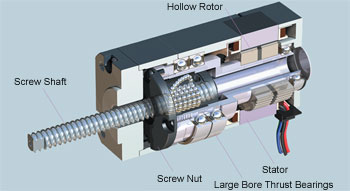
A série DRLII apresenta uma estrutura na qual o rotor é vazado e o fuso de esferas é armazenado em seu interior. A rotação do rotor vazado faz girar a porca do fuso de esferas e, ao estabelecer um mecanismo* antigiro na ponta do fuso de esferas, o eixo do fuso de esferas é movido de maneira linear.
Como o fuso de esferas é armazenado na seção do rotor oco, o curso máximo é garantido com o menor comprimento total. Há também um grande mancal com furo, posicionado na circunferência externa da porca do fuso de esferas, para receber diretamente as grandes cargas de propulsão geradas no movimento linear.
*Não é necessário para o tipo com guia.
Alta precisão de posicionamento
A porca do fuso de esferas é ligada com o rotor oco. Através da rigidez do acoplamento e outros aspectos da combinação das peças, o impacto de folga foi minimizado, alcançando um posicionamento de alta precisão.

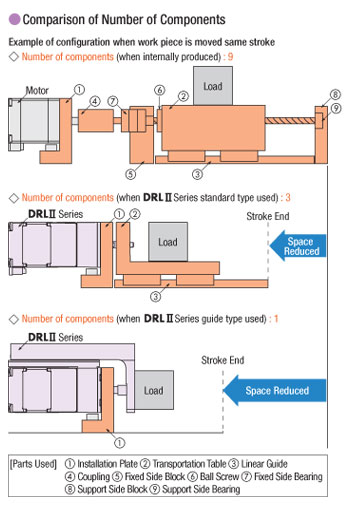
Tempo significativamente reduzido para o projeto
O corpo compacto aloja todo o mecanismo de movimento linear. O uso de peças convencionais produzidas internamente não é mais necessário, reduzindo, deste modo, o tempo para o projeto do equipamento e seleção de peças. Além disso, isto reduz o tempo necessário para a montagem e aumenta a eficiência de produção.
Para imediatamente sem vibração
Os atuadores lineares compactos da série DRLII usam motores de passo. Como se trata de um motor de passo, a precisão de posicionamento por passo é elevada e o motor pode ser movido para a frente e voltar de forma precisa.
Além disso, uma vez que o movimento fino do eixo (chamado de oscilação) não ocorre na parada, a posição de parada pode ser atingida corretamente.
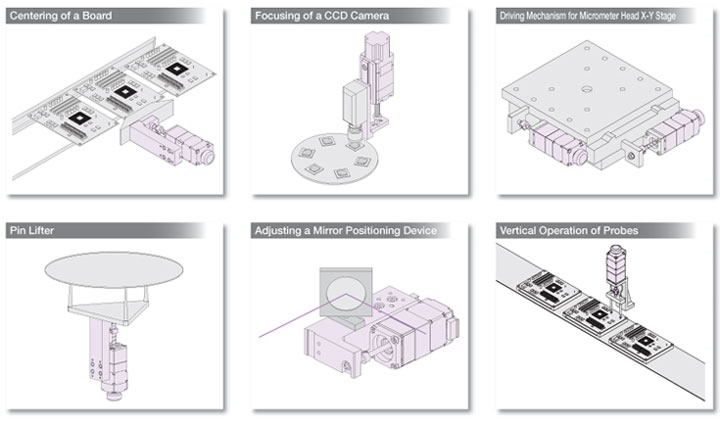
Exemplos de aplicação
Tipo Guia
- 20 mm (0.79 in.)
- 28 mm (1.10 in.)
- 42 mm (1.65 in.)
- 60 mm (2.36 in.)

Os atuadores lineares compactos, com guia embutida, reduzem a necessidade de um mecanismo antigiro externo, reduzindo ainda mais as peças necessárias para o projeto de suas aplicações.
Fuso de esferas retificado
Ideal para aplicações onde a alta precisão de posicionamento e baixa vibração são necessárias, como dispositivos ópticos e sistemas semicondutores que usam passos de avanço fino. O tipo de fuso de esferas retificado DRLII alcança uma elevada confiabilidade ao maximizar o desempenho de um motor de passo de 5 fases.
Fuso de esferas laminado*
Ideal para aplicações de posicionamento geral, onde a confiabilidade e facilidade de uso são uma prioridade. Ele combina a propulsão e resolução superiores do fuso de esferas retificado com a maior facilidade de uso.
*Fuso de esferas laminado indisponível em tamanho de estrutura de 20 mm (0,79 pol.)
Padrão
- 20 mm (0.79 in.)
- 28 mm (1.10 in.)
- 42 mm (1.65 in.)
- 60 mm (2.36 in.)

Os atuadores lineares compactos, com guia embutida, reduzem a necessidade de um mecanismo antigiro externo, reduzindo ainda mais as peças necessárias para o projeto de suas aplicações.
Fuso de esferas retificado
Ideal para aplicações onde a alta precisão de posicionamento e baixa vibração são necessárias, como dispositivos ópticos e sistemas semicondutores que usam passos de avanço fino. O tipo de fuso de esferas retificado DRLII alcança uma elevada confiabilidade ao maximizar o desempenho de um motor de passo de 5 fases.
Fuso de esferas laminado*
Ideal para aplicações de posicionamento geral, onde a confiabilidade e facilidade de uso são uma prioridade. Ele combina a propulsão e resolução superiores do fuso de esferas retificado com a maior facilidade de uso.
*Fuso de esferas laminado indisponível em tamanho de estrutura de 20 mm.
Motor
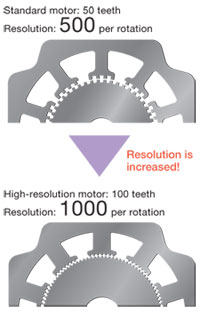
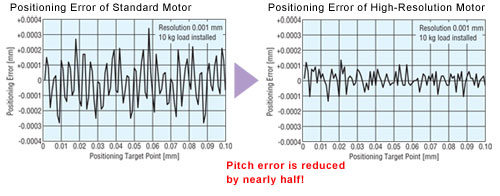
Motores de tipo de alta resolução (0,36°) e padrão (0,72°)
Os motores* de alta resolução atingem uma elevada precisão e confiabilidade, com base na mais recente tecnologia de usinagem de precisão da Oriental Motor. A resolução do motor é aumentada para duplicar o nível de um modelo padrão e reduzir o ângulo de deslocamento em relação ao torque e, deste modo, atingir uma elevada precisão de posição. Disponíveis nos tamanhos de 28 mm, 42 mm e 60 mm.
Na operação de avanço fino por micropassos, o atuador não operará até que o torque inicial do motor exceda a carga de fricção. O motor de alto desempenho, com seu torque elevado de saída, permite que o torque seja adquirido rapidamente e, deste modo, garante uma operação uniforme, mesmo com avanço fino.
*Somente o fuso de esferas retificado
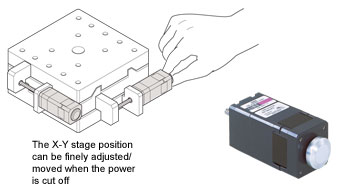
Botão de ajuste
- 20 mm
- 28 mm
- 42 mm
- 60 mm

A posição de carga pode ser ajustada manualmente quando a energia é desligada Esta função é útil durante a manutenção do equipamento.
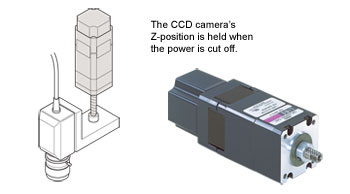
Freio eletromagnético
- 28 mm
- 42 mm
- 60 mm

A posição de carga pode ser retida quando a energia é desligada. Uma vez que o trabalho não cairá no caso de falha de energia ou desconexão, é possível usar o equipamento com segurança no qual o trabalho se move verticalmente.
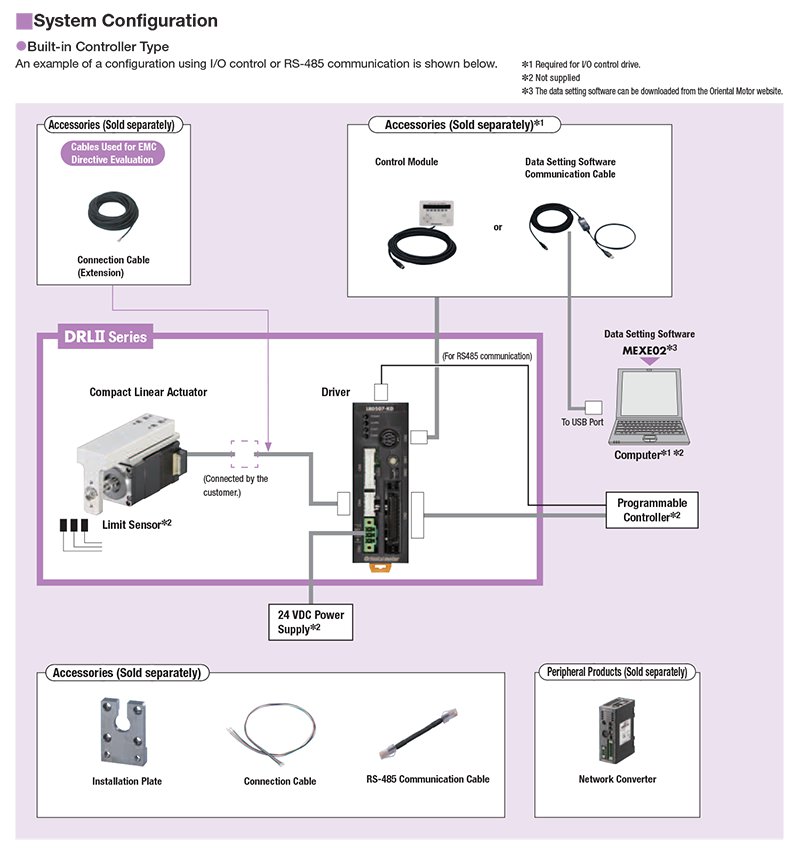
Driver acoplado (Rede)
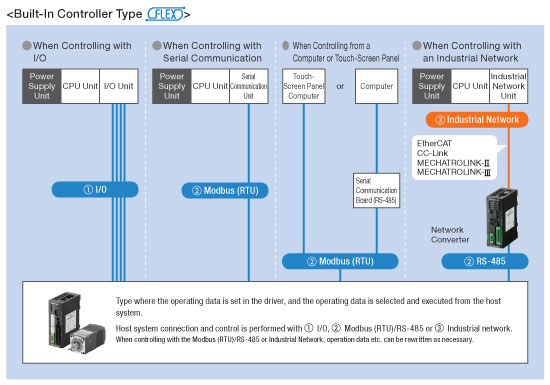
1. I/O
As funções de um módulo de posicionamento (gerador de pulso) estão acopladas no driver, permitindo que se conecte diretamente a um controlador ou PLC para configurar um sistema operacional com I/O. Como não é necessário um módulo de posicionamento no PLC, ocorre economia de espaço e simplificação do sistema.
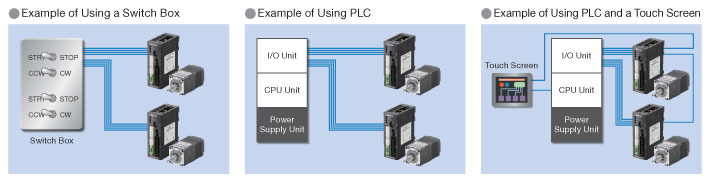
Controle de I/O por meio de comutadores - Como os dados operacionais são definidos no driver, o motor pode dar partida e parar com comutadores manuais.É possível obter fácil controle sem o uso de um PLC.
Controle de I/O via PLC (não é necessário módulo de posicionamento) - Os dados operacionais são definidos no driver, permitindo sua conexão direta com um PLC para selecionar o perfil de movimento. Como não é necessário um módulo de posicionamento no PLC, ocorre economia de espaço e simplificação do sistema.
Controle de I/O via PLC, distância de viagem e definição de velocidade operadas por tela sensível ao toque (HMI) - Normalmente, o motor dá partida e para via I/O e a comunicação Modbus (RTU) é usada na definição do alarme e dos dados operacionais.As alterações de configurações e exibições do monitor e do alarme são realizadas na tela sensível ao toque.Se houver várias configurações, será possível inserir os parâmetros na tela sensível ao toque, reduzindo a carga de combinar programas e sequências.
2. Modbus (RTU) / RS-485
Os dados operacionais, as configurações de parâmetro ou os comandos de operação podem ser inseridos pela comunicação RS-485. É possível conectar, no máximo, 31 drivers a um módulo de comunicação em série. Existe também uma função para o início simultâneo de vários eixos. O protocolo é compatível com Modbus (RTU) e pode ser conectado a uma tela sensível ao toque (HMI), PC etc.
3. Rede de Automação de Fábrica (FA)
Com um conversor de rede (vendido separadamente), é possível estabelecer conexão com CC-link ou MECHATROLINK. Os dados operacionais, as configurações do parâmetro ou os comandos operacionais podem ser inseridos facilmente.
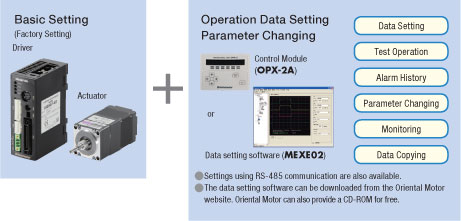
Opções de programação (para o controlador acoplado)
Configuração de dados e funções adicionais
Como o driver possui as informações necessárias para a operação do atuador, a sobrecarga no PLC host é reduzida. A configuração do sistema ao usar controle de multieixos foi simplificada. Os ajustes são configurados com o uso do módulo de controle (vendido separadamente), software de configuração de dados ou comunicação RS-485.
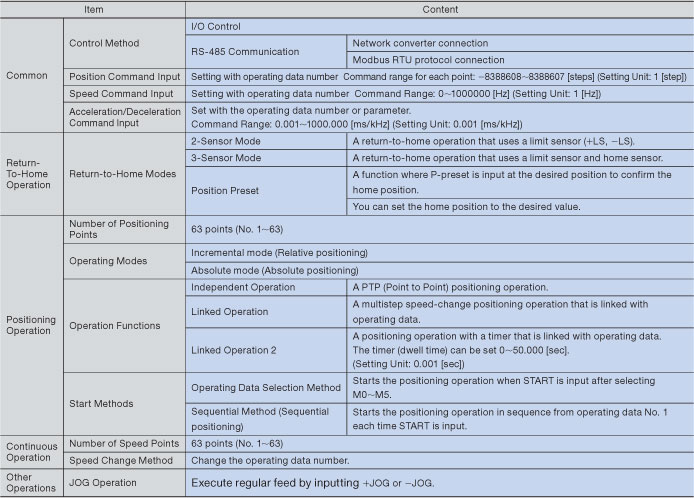
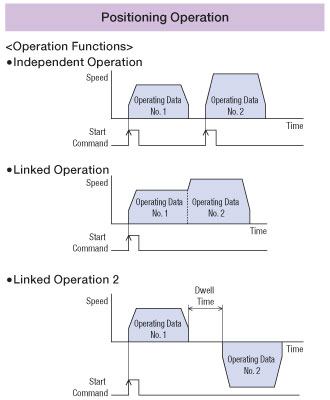
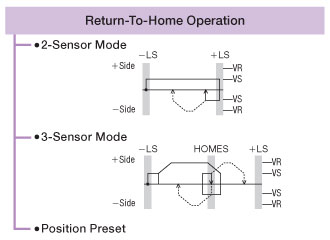
Tipos de operação
Com o tipo de controlador acoplado, a velocidade de operação e a distância de percurso do atuador são configuradas com dados operacionais, e a operação realizada é baseada nos dados operacionais selecionados.
Há 4 tipos de operação.
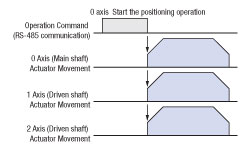
Função de envio de grupo (através da comunicação RS-485 ou conversor de rede)
É possível configurar um grupo de vários eixos conectados usando a comunicação RS-485 e enviar os comandos por grupo. Também é possível realizar operação simultânea para vários eixos.
Função de saída PLS-OUT
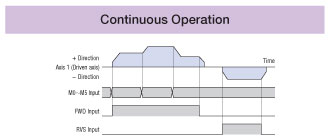
Operação síncrona possível
Ela envia sinais com o mesmo número e velocidade de pulsos conforme o valor de comando.
O sinal PLS-OUT e o DIR-OUT (sinal de direção de rotação) pode ser enviado para outro driver para acionar o atuador para outro eixo.
Usado para contagem de posição
A posição de comando para o atuador pode ser verificada pela contagem dos sinais de saída.
Função de ensino
Pode ser realizada com o módulo de controle OPX-2A (vendido separadamente) ou com o software de configuração de dados MEXE02. A mesa é movida para a posição desejada e os dados de posição neste momento são armazenados como dados de posicionamento.
Gateways de rede

O protocolo de comunicação do controlador mestre, rede Industrial, é convertido para o próprio protocolo de comunicação RS-485 da Oriental Motor. A conexão aos produtos compatíveis com a rede da Oriental Motor é completada com um cabo de comunicação RS-485.
- Redes Compatíveis:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*Para uso com o tipo de dados armazenados (Rede)
![]()
![]()
![]()
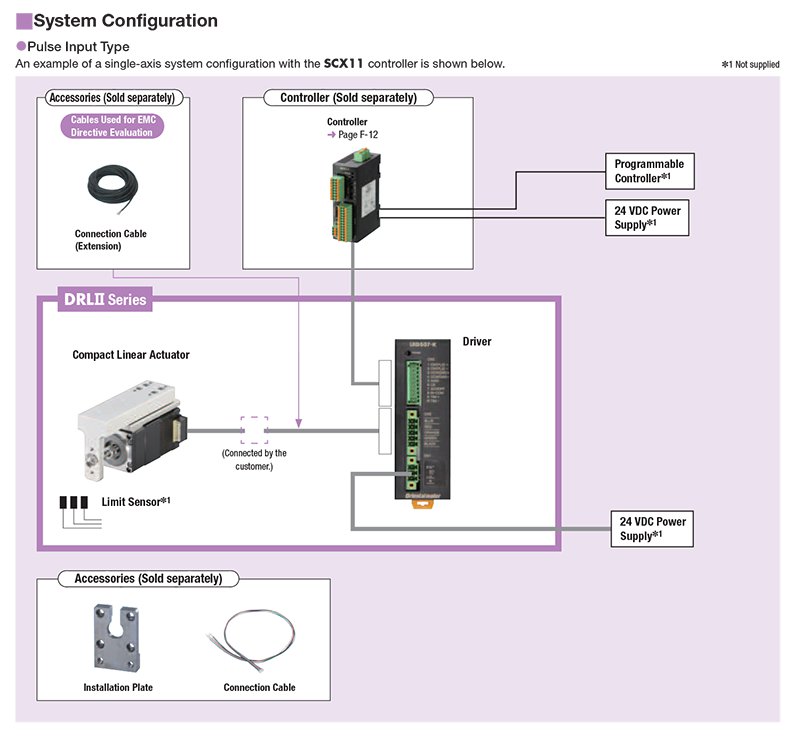
SCX11 Driver Universal de Eixo Simples

O SCX11 é um controlador altamente funcional e sofisticado, equipado com funções de edição e execução de programas. Use o SCX11 como um controlador de programa armazenado para se conectar a qualquer um dos drivers de entrada de pulso padrão do Motor Oriental. O SCX11 também é capaz de controlar o motor através de comunicações seriais como USB, RS-232C e CANopen. Aceita entradas de encoder.
*Para uso com o controlador de entrada de pulso.
Cabo de Comunicação RS-485

Esses cabos são usados para ligar os drivers quando um tipo de controlador acoplado estiver sendo operado em um modo de quedas múltiplas.
*Para uso com o tipo de dados armazenados (Rede)
Control Opções - Módulo de controle

As configurações de parâmetros do driver interno e as configurações de dados podem ser estabelecidas e alteradas. Elas podem também ser usadas para o monitoramento de I/O, aprendizado, etc.
*Para uso com o tipo de dados armazenados (Rede)
Opções de controle - Software de configuração de dados

Este cabo de comunicação é necessário para a conexão ao computador no qual o software de configuração de dados está instalado.
Placa de montagem

Um suporte de montagem dedicado para a instalação do atuador da série DRL. Cada placa de montagem é fornecida com parafusos de montagem para prender o atuador à placa.
Modelo |
Produto Aplicável |
DRL20 |
|
DRL28 |
|
DRL42 |
|
DRL60 |
Configuração do Sistema