

















DRS2 Series Compact Linear Actuators

Atuadores lineares compactos da série DRS2
A série DRS2 usa o motor e driver da série AZ. O atuador é equipado com o encoder absoluto mecânico. O encoder absoluto é um sensor mecânico de giros múltiplos, não sendo necessário o uso de sensor externo. Ajudando na economizar espaço e cabeamento, e cria um design mais compacto e leve para o equipamento. Atuador disponível com ou sem guia. Tambem opcionais de Freio eletromagnético e fuso esferas retificado ou rolado (Rolled or Ground ball screws).
O controlador acoplado (dados armazenados) permite um acesso à rede facilitando e controle multi eixos.
- Motor de encoder absoluto série AZ
- Controlador embutido (tipo de rede), entrada de pulso ou entrada de pulso com drivers de comunicações RS-485
- Entrada de 24/48 VCC
- Precisão de posicionamento repetitivo
- Fuso de esferas retificado = ±0,003 mm
- Fuso de esferas laminado = ±0,01 mm

Encoder absoluto mecânico
Linha de produtos
Tipo de atuador |
Tipo de driver |
Alimentação |
Opções disponíveis |
Força de atração |
Curso |
||
Atuador linear com guia de 42 mm (1,65 pol.) |
24/48 VCC |
Freio eletromagnético |
50 N 200 N |
11.2 lb 45 lb |
40 mm |
1,57 pol. |
|
42 mm (1,65 pol.) Atuador linear |
24/48 VCC |
Freio eletromagnético |
50 N 200 N |
11.2 lb 45 lb |
40 mm |
1,57 pol. |
|
60 mm (2,36 pol.) Atuador linear |
24/48 VCC |
Freio eletromagnético |
500 N |
112 lb |
50 mm |
1,97 pol. |
|



Atuadores lineares compactos
Design e estrutura confiáveis

Um roto vazado e uma porca do fuso esfera são unidos. Uma vez que não são necessárias peças de conexão, há menos folga do que quando a rigidez do acoplamento, entre outros, combina outras peças. Portanto, um posicionamento altamente preciso por ser obtido.
Alta precisão de posicionamento
A porca do fuso esferas é ligada com o rotor vazado. Através da rigidez do acoplamento e outros aspectos da combinação das peças, o impacto de folga foi minimizado, alcançando um posicionamento de alta precisão.

Fuso de esferas retificado (Ground)
Ideal para aplicações onde a alta precisão de posicionamento e baixa vibração são necessárias, como dispositivos ópticos e sistemas semicondutores que usam passos de avanço fino. O tipo de fuso de esferas retificado DRS alcança uma elevada confiabilidade ao maximizar o desempenho de um motor de passo de 5 fases.
Fuso de esferas laminado (Rolled)
Ideal para aplicações de posicionamento geral, onde a confiabilidade e facilidade de uso são uma prioridade. Ele combina a propulsão e resolução superiores do fuso de esferas Rolado com a maior facilidade de uso.
Estrutura compacta aloja todo o mecanismo de movimento linear
Como os clientes não precisam fornecer peças, o tempo necessário para instalar, projetar e selecionar peças pode ser reduzido. O número de horas-homem necessárias para a montagem e o ajuste da precisão da instalação podem ser reduzidos, contribuindo para uma maior produtividade.
Tempo de instalação reduzido

Economia de espaço e menos cabeamento com o sensor absoluto
Além da estrutura compacta e leve, os motores com sensores absolutos não requerem um sensor de posição inicial. Isso economiza espaço e fiação e permite evitar manutenção de rotina ou problemas causados pelo uso de um sensor de posição inicial.

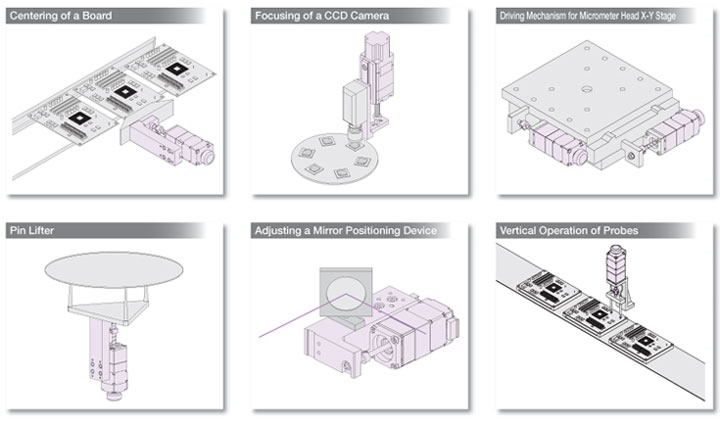
Exemplos de aplicação
Operação de compressão eficiente
Força e tempo de compressão
A série DRS2 pode realizar uma operação de compressão após uma operação de posicionamento com facilidade. Além disso, o tempo e a força de compressão são ajustáveis.
- Você pode ajustar a força e o tempo de compressão para um número de dados de operação e, em seguida, selecionar o número dos dados para alterar as configurações.
- Existem diferentes maneiras de mudar as fases de compressão, como diminuir a força para que a posição não mude, aumentar a força lentamente a força ou aumentar a força rapidamente.

Compressão em baixa velocidade
O motor pode aproximar-se da carga em alta velocidade O motor desacelera logo antes de atingir a superfície em baixa velocidade.
- Uma vez que o impacto de pressão é mínimo, não é necessário um mecanismo de absorção de choque.
- O motor pode se aproximar em alta velocidade logo antes de atingir a superfície, reduzindo assim o tempo de remoção.

Operação de compressão com tipo de entrada de pulso
Quando a entrada T-MODE é configurada, é possível a operação de compressão, sem o alarme de sobrecarga para o tipo de entrada de pulso que está sendo gerado. Isso é útil para operação de compressão enquanto usa-se o controle de sinal de pulso.
Tipo Guia
- 42 mm (1.65 in.)

Os atuadores lineares compactos, com guia embutida, reduzem a necessidade de um mecanismo antigiro externo, reduzindo ainda mais as peças necessárias para o projeto de suas aplicações.
Alta massa transportável e alta velocidade são alcançadas
Massa transportável máxima
- Direção horizontal: 10 kg [Lead 2 mm], 5 kg [Lead 8 mm]
- Direção vertical: 10 kg [Lead 2 mm], 5 kg [Lead 8 mm]
Velocidade máxima
- 50 mm/s [Lead 2 mm], 200 mm/s [Lead 8 mm]
Tipo Padrão
- 42 mm (1.65 in.)
- 60 mm (2.36 in.)

Os atuadores lineares compactos padrão, tipo sem guia, exigem o uso de um mecanismo antigiro.

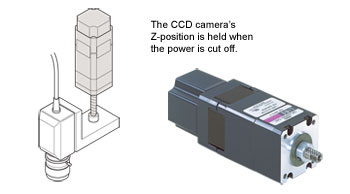
Freio eletromagnético
- 42 mm (1.65 in.)
- 60 mm (2.36 in.)

A posição de carga pode ser retida quando a energia é desligada. Uma vez que o trabalho não cairá no caso de falha de energia ou desconexão, é possível usar o equipamento com segurança no qual o trabalho se move verticalmente.
Controlador acoplado (Rede)

1. I/O
Devido ao fato da função da unidade de posicionamento (geração de pulsos) ser acoplada ao driver, você pode construir um sistema de operação usando a E/S através da conexão direta a uma caixa de comutação ou PLC. Como não é necessária uma unidade de posicionamento no PLC, ocorre economia de espaço e simplificação do sistema.
Usando uma caixa de comutação - Como os dados operacionais estão configurados no driver, o atuador pode ser iniciado e parado simplesmente conectando um interruptor que você tiver à mão. O controle pode ser realizado facilmente sem usar PLC.
Usando o PLC - Ao usar o PLC, você pode criar um sistema de operação conectando-se diretamente a uma unidade de E / S. Como não é necessária uma unidade de posicionamento no PLC, ocorre economia de espaço e simplificação do sistema.
Usando o PLC e uma tela de toque - Normalmente, o atuador é iniciado e interrompido com E/S. Alteração das configurações de dados operacionais e exibição dos monitores e alarmes são realizadas com a tela sensível ao toque usando a comunicação Modbus (RTU). Quando há muito trabalho de configuração, as mudanças podem ser realizadas facilmente na tela de toque, e a carga de criação de escadas é reduzida.
2. Modbus (RTU) / RS-485
Os dados e parâmetros operacionais podem ser ajustados e os comandos de operação podem ser inseridos pela comunicação RS-485. É possível conectar até 31 drivers a cada unidade de comunicação em série. Há também uma função que permite a partida simultânea de vários eixos. O protocolo é compatível com Modbus (RTU), permitindo a conexão com dispositivos, tais como computadores e PCs com painéis sensíveis ao toque.
3. Redes industriais
O uso de um conversor de rede (vendido separadamente) permite suporte com comunicação EtherCAT, comunicação CC-Link e comunicação MECHATROLINK. Os dados e parâmetros operacionais podem ser ajustados e os comandos de operação podem ser inseridos ao utilizar vários métodos de comunicação.
Motor de passo absoluto série AZ
Sensor Absoluto Recém-Desenvolvido

A Oriental Motor desenvolveu um sensor absoluto mecânico compacto, com baixo custo e sem uso de bateria (patenteado). Isso pode ajudar a aumentar a produtividade e reduzir os custos.
Sensor tipo mecânico
Um sensor mecânico composto por várias engrenagens é usado. A informação do posicionamento é detectada ao reconhecer o ângulo das engrenagens individuais.
Sensor absoluto de giros múltiplos
A detecção de posição absoluta é possível com ±900 rotações (1800 rotações) do eixo do motor a partir da posição inicial de referência.
Método de Configuração da Posição Inicial
A posição inicial pode ser facilmente definida ao pressionar um interruptor na superfície do driver, que é salva pelo Sensor Absoluto. Além disso, a configuração de posição inicial é possível com o software de configuração de dados (MEXE02) ou utilizando um sinal de entrada externo.
Sem bateria
Não é necessário o uso de baterias graças ao sensor mecânico. A informação de posicionamento é gerenciada mecanicamente pelo sensor absoluto.
Informação de posicionamento de retenção
Mesmo se a alimentação for desligada durante uma operação de posicionamento ou o cabo entre o atuador e o acionado estiver desconectado, as informações de posicionamento são mantidas. Com o tipo de controlador embutido, você pode reiniciar a operação de posicionamento, sem executar retorno para posição inicial, após uma parada de emergência na linha de produção ou um apagão.

Manutenção reduzida
Manutenção Reduzida devido à ausência de bateria a ser substituída, o tempo de manutenção e os custos podem ser reduzidos.
Possibilidades ilimitadas de instalação do driver
Como não é necessário ter um espaço para a substituição de bateria, não há restrições quanto ao local de instalação do driver, melhorando a flexibilidade e liberdade do design de layout da caixa de controle.
Vendas com envio para o exterior
Baterias normais se descarregam, portanto, deve-se tomar cuidado quando o equipamento exigir um longo tempo de transporte, como quando é enviado para o exterior. O Sensor Absoluto não exige uma bateria, portanto, não há limite para quanto tempo a informação de posicionamento é mantida. Além disso, não há necessidade de se preocupar sobre vários regulamentos de segurança, que devem ser levados em conta ao enviar uma bateria para o exterior.
Não são exigidos sensores externos
Com o uso do sistema absoluto, os sensores externos como o sensor inicial e o sensor de limite não são necessários.
Voltar-para-a-Posição-Inicial em Alta Velocidade
Como a função de voltar para a posição inicial é possível sem um sensor externo, a função de voltar para a posição inicial pode ser desempenhada em alta velocidade sem levar em conta a especificação para sensibilidade do sensor, permitindo um ciclo de máquina reduzido.
Redução de custos
Os custos com sensor e fiação podem ser reduzidos, permitindo a redução de custos de sistema.
Cabeamento simples
A fiação é simplificada e o grau de liberdade para o design de equipamento é aumentado.
Não é afetado por mau funcionamento do sensor externo
Não há necessidade de preocupação com os defeitos do sensor, falhas do sensor ou desconexões da fiação do sensor.
Precisão de retorno à posição inicial melhorada
A precisão da posição inicial é aumentada porque a operação de voltar para a posição inicial é desempenhada independente de quaisquer variações na sensibilidade do sensor da posição inicial.
*Se nenhum sensor de limite estiver instalado, os movimentos que excedem os valores limite podem ser evitados através do uso dos limites no software do driver.
Gateways de rede

O protocolo de comunicação do controlador mestre – a rede de Automação de Fábrica (FA) – é convertido para o próprio protocolo de comunicação RS-485 da Oriental Motor. A conexão com produtos de redes compatíveis da Oriental Motor é concluída com um cabo de comunicação RS-485.
- Redes compatíveis:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*Para uso com o tipo de dados armazenados (Rede)
![]()
![]()
![]()
Controle universal SCX11

O SCX11 é um controlador altamente funcional e sofisticado equipado com funções de edição e execução de programas. Use o SCX11 como um controlador de programa armazenado para conectar-se a qualquer um dos drivers de entrada de pulso padrão da Oriental Motor. O SCX11 também é capaz de controlar o motor através de comunicações em série, como USB, RS-232C e CANopen.
*Para uso com o driver de Tipo de Entrada de Pulso.
Cabo de Comunicação RS-485

Esses cabos são usados para vincular os drivers quando um tipo de controlador acoplado estiver sendo operado em um modo de quedas múltiplas.
*Para uso com o tipo de dados armazenados (rede) e tipo de entrada de pulso com comunicação RS-485
Cabos para drivers de eixo único

Esses cabos são usados para conectar ou estender a distância entre o motor e o driver de eixo único.
Necessários (vendidos separadamente).
Use um cabo de motor flexível se o motor for instalado em uma peça móvel ou se seu cabo será flexionado.
*Controlador/driver multieixos exige cabos diferentes
Opções de controle - Software de configuração de dados (MEXE02)

Este cabo de comunicação é necessário para a conexão ao computador no qual o software de configuração de dados está instalado.
Placa de montagem

Um suporte de montagem dedicado para a instalação do atuador da série DRL. Cada placa de montagem é fornecida com parafusos de montagem para prender o atuador à placa.
Modelo |
Produto Aplicável |
DRSM42 |
|
DRSM60 |
Cabos para propósito geral

Este é um cabo blindado equipado com um conector de meia altura em uma extremidade do cabo que se encaixa no driver. Na outra extremidade encontram-se fios de chumbo laminados alinhados a uma altura de 1,27 mm (0.05 pol.), o que é conveniente para os conectores de deslocamento de isolamento.
Item |
Comprimento |
1 m (3.3 ft.) |
|
2 m (6.6 ft.) |
Configuração do Sistema



