

















Visão geral do Servomotor
Estrutura dos servomotores
O servomotor possui um detector de rotação (encoder) montado no lado traseiro do eixo do motor para detectar a posição e a velocidade do rotor. Isso permite uma operação de posicionamento de alta resolução e alta resposta.
A figura a seguir mostra a construção de um servomotor padrão.
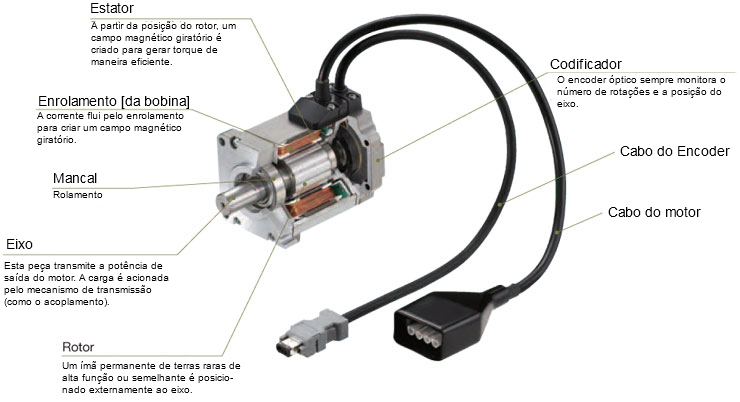
- 1. Estator A partir da posição do rotor, um campo magnético giratório é criado para gerar torque de maneira eficiente.
- 2. Enrolamento [da bobina] A corrente flui pelo enrolamento para criar um campo magnético giratório.
- 3. Mancal Rolamento
- 4. Eixo Esta peça transmite a potência de saída do motor. A carga é acionada pelo mecanismo de transmissão (como o acoplamento).
- 5. Rotor Um ímã permanente de terras raras de alta função ou semelhante é posicionado externamente ao eixo.
- 6. Codificador O encoder óptico sempre monitora o número de rotações e a posição do eixo.
- 7. Cabo do Encoder
- 8. Cabo do motor
O encoder é um sensor para detectar a velocidade e a posição do motor. A luz do diodo emissor de luminosidade (LED) passa por um padrão de detecção de posição no disco de fenda e é lida pelo elemento fotorreceptor. Dúzias de fototransistores são integrados no elemento fotorreceptor. Todos os padrões para detecção absoluta da posição dependem do ângulo de rotação do encoder. A CPU é montada no encoder para análise dos padrões de detecção absoluta da posição. Os dados da posição atual são transmitidos para o servo-acionador via transmissão serial.
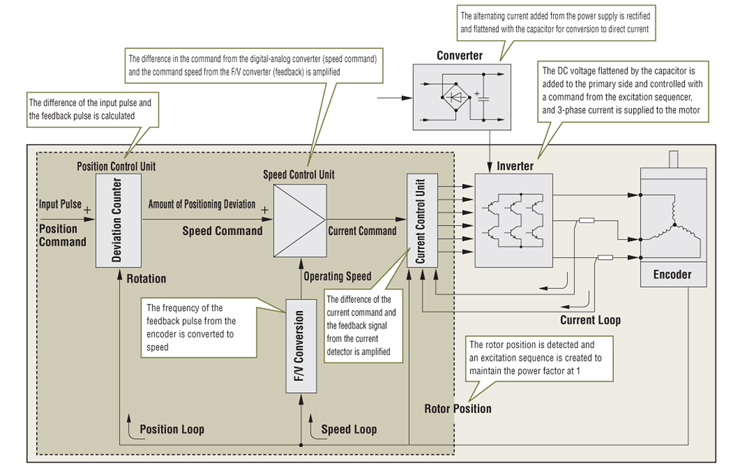
Diagrama de bloco de controle do servomotor
Um sinal de pulso aplicado externamente (quando for o tipo de entrada de pulso) e a rotação detectada pelo encoder do servomotor, são contados e a diferença (desvio) é enviada para a unidade de controle da velocidade. O contador é referido como o contador de desvio. Durante a rotação do motor, um pulso acumulado (desvio de posicionamento) é gerado no contador de desvio e é controlado para chegar a zero. A (manutenção de posição pelo servo-controle) função para manter a posição atual é obtida com um circuito de posição (contador de desvio).
O servomotor é composto por três elementos: o motor, o encoder e o acionador. O acionador tem a função de comparar o comando de posição e as informações de posição/velocidade do encoder e controlar a corrente do acionador. O servomotor sempre detecta a condição do motor a partir das informações de posição e velocidade do encoder. Se o motor parar, o servomotor emite um sinal de alarme para o controlador para detecção de anormalidade. O servomotor deve ajustar os parâmetros do sistema de controle para corresponder à rigidez do mecanismo e das condições de carga, apesar de que nos anos recentes, o autoajuste em tempo real tornou esse ajuste mais fácil.